Bras Lyappa
Le bras Lyappa (ou Ljappa) est un bras robotique utilisé lors de l'assemblage de la station spatiale Mir.

Présentation
modifierChacun des modules, Kvant-2, Kristall, Spektr et Priroda, était équipé d'un de ces bras à entraînement mécanique, qui, après que le module avait été amarré au port avant du module central de Mir, accrochait l'un des deux appareils placés sur le module d'amarrage concentrateur du module de base. La sonde d'amarrage du module principal était ensuite rétractée, et le bras soulevait le module afin qu'il puisse être pivoté de 90° pour un amarrage à l'un des quatre ports d'amarrage permanent radiaux[1],[2],[3].
Galerie
modifier-
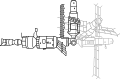
 Bras Lyappa et préhenseur sur Mir.
Bras Lyappa et préhenseur sur Mir. -
 Un schéma montrant comment le bras Lyappa a été utilisé pour déplacer Kvant-2.
Un schéma montrant comment le bras Lyappa a été utilisé pour déplacer Kvant-2.


Notes et références
modifier- (en) David Harland, The Story of Space Station Mir, New York, Springer-Verlag New York Inc, (ISBN 978-0-387-23011-5, LCCN 2004058915, lire en ligne)
- David S. F. Portree, Mir Hardware Heritage, NASA, (lire en ligne)
- http://see.msfc.nasa.gov/sts79.pdf